Teilprojekt 9: Steuerungs- und Regelungskonzepte für die Systemintegration in I-FEV
Motivation
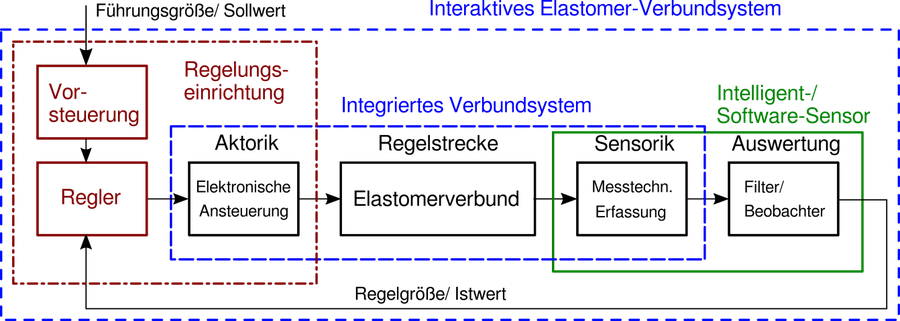
Die mechanischen Eigenschaften von Faser-Elastomer-Verbunden mit gradienten und schaltbaren Eigenschaften können unter komplexer Belastung (Zug, Druck, Temperatur) erheblich variieren. Um räumliche stark nichtlineare Verformungen von komplex aufgebauten Elastomerverbunden gezielt und reproduzierbar einzustellen, ist eine adaptive bzw. robuste Regelung erforderlich. Die Regelung des Verformungszustands erfordert die echtzeitfähige Überwachung bzw. ortaufgelöste Detektion des Deformationszustandes. Mit der adaptiven Regelung unter Verwendung der in-situ sensorischen Rückkopplung sollen zusätzliche Fertigungstoleranzen, Ermüdungserscheinungen und weitere unerwünschte Effekte (z. B. Temperatureinflüsse) weitestgehend unterdrückt bzw. gedämpft werden.
Stand der Forschung und eigene Vorarbeiten
Auf Basis eines konsequent nichtlinearen Reglerentwurfs lassen sich zahlreiche komplizierte Systeme gezielt beeinflussen. Die modellbasierte Erfassung des Istzustandes kann über sensorbasierte Filteransätze ermöglicht werden. Diesbezüglich spricht man auch von intelligenten bzw. Software-Sensoren. Zusätzlich erfordert der Entwurf von Sensoren, die auf Kompensationsprinzipien beruhen, die Auslegung geeigneter Regler. Für den Reglerentwurf in der industriellen Praxis haben sich Parameterraumverfahren bewährt. In ersten Untersuchungen wurde die Positionsregelung eines adaptiven Elastomer-Verbundes erfolgreich erprobt.
Wissenschaftliche Fragestellung und Projektziele
Ziel des TP ist die Erforschung von echtzeitfähigen, robusten Algorithmen zur autarken Steuerung und Regelung stufenlos einstellbarer und hochdynamischer Funktionalitäten für komplexe Verformungsmuster und angepasste Bauteilsteifigkeiten der hierarchisch aufgebauten I-FEV. Dabei sind die nichtlinearen und hysteresebehafteten Übertragungscharakteristiken von FGL- und Perkolationsnetzwerk-basierten Wandlern besonders zu berücksichtigen. Neben der a-priori Identifikation wesentlicher Prozessmerkmale kommt der echtzeitfähigen Modellierung sich stets verändernder Prozesseigenschaften eine große Bedeutung zu. Derartige modellbasierte Berechnungen sind mit Filter- oder Beobachteransätzen weiterzuentwickeln. Hierzu werden Methoden der Fehlerdetektion, die sehr eng mit Filter- und Beobachterkonzepten verbunden sind, eingesetzt. Robuste Regelungsverfahren werden entwickelt und erprobt, so dass auch bei bestehenden Parameterunbestimmtheiten (z. B. Produktionstoleranzen, Drift durch Abnutzung) die gewünschte Funktionalität der jeweiligen Baugruppe gewährleistet ist. Für diesen Entwurfsschritt eignen sich energiebasierte Entwurfskonzepte, wie Sliding-Mode-Verfahren, die eine Stabilisierung über Ljapunov- bzw. Passivitätsansätze erzwingen. Dazu sind wissenschaftlich anspruchsvolle Stabilitätsbetrachtungen und -abschätzungen nötig, aus denen unter Berücksichtigung der Systemstruktur die echtzeitfähigen, robusten Regelungsalgorithmen resultieren.
Kontakt
Institut für Regelungs- und Steuerungstheorie (RST), Fakultät Elektrotechnik und Informationstechnik der TU Dresden
 © K. Röbenack
© K. Röbenack
Professor
NameHerr Prof. Dr.-Ing. habil. Dipl.-Math. Klaus Röbenack
Institutsdirektor
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Zertifikat der DFN-PKI für verschlüsselte E-Mails.
SHA1 Fingerprint: 5D:0B:FB:6F:92:2B:87:36:F5:F5:F0:48:64:77:66:8C:DB:58:56:7A
Institut für Regelungs- und Steuerungstheorie
Institut für Regelungs- und Steuerungstheorie
Besuchsadresse:
Institutsgebäude S7a, Raum 405 (Sekretariat 406) Georg-Schumann-Straße 7a
01187 Dresden