Trajectory optimization using TOMATO and SOPHIA
Along the ambitious Single European Sky (SESAR) objectives which are a increase in capacity, environmental sustainability, and reduction in costs, air space users shall be freed from some of the numerous operational constraints during flight. In order to reach these targets, concepts as Trajectory Based Operations (TBO) and Reference Business Trajectories (RBT) enable air carriers to choose optimal and efficient flight profiles based on their individual requirements. Therefore, the Chair of Air Transport Technology and Logistics at Technische Universität Dresden developes models for the optimization of waypointless trajectories within a four-dimensional environment.
This is primarily the identification of the most eco-efficient flight path by a Shortest Path algorithm and a coupled calculation of an energy-optimal vertical profile by the SOPHIA performance model (Sophisticated Aircraft Performance Model). Both optimization modules and an additional assessment module iteratively improve the trajectory within the software platform TOMATO (TOolchain for Multicriteria Aircraft Trajectory Optimization). Figure 1 shows input and output data and the optimization process.
TOMATO and SOPHIA are used and enhanced in the following projects:
- ATLAS: Air Transport Analysis and Technology Synergy Study
- ReMAP: Risk analysis and conflict resolution of multi-criteria-efficient approach and departure procedures
- ProfiFuel: Improved planning and realization of flight profiles with the lowest ecological footprint and minimum fuel consumption
- UTOPIA II: Enhanced Flight Planning by introducing stochastic trajectory data
- CDO-Speedbrakes: Optimized CDO under uncertain environmental and mission conditions
- MEFUL: Minimizing Flight Emissions while Sustaining Guaranteed Operational Safety as a Contribution to an Environmental Friendly Air Transport System
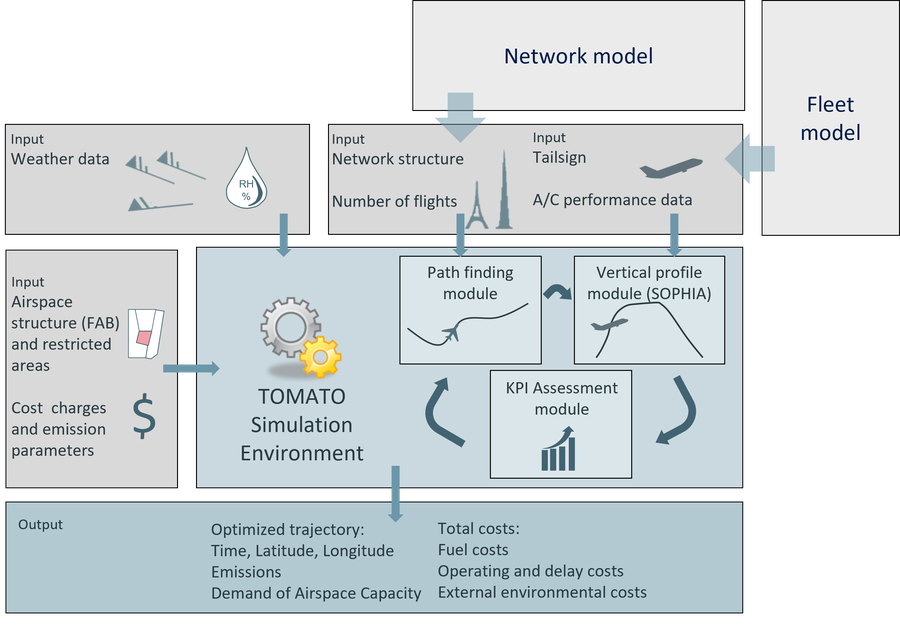
Figure 1: Workflow of trajectory optimization and assessment with TOMATO
For the trajectory optimization, a flight performance model and a lateral pathfinding algorithm are used iteratively by the simulation environment TOMATO defining the input parameters for both models and assessing the trajectories regarding the KPIs. Figure 1 shows the iterative workflow and the interactions between input data, pathfinding module and flight performance model, as well as the trajectory assessment within TOMATO.
The input parameters are defined by weather data, city pairs and aircraft type together with information of the airspace structure and cost charges. Therewith, the pathfinding module calculates the lateral trajectory at cruising altitude, considering the global target function of the optimization (e.g. minimum costs). For lateral trajectory optimization, an efficient A* algorithm is used to find the shortest path between origin and destination under consideration of local restrictions (e.g. contrail sensitive regions) and wind vectors within the given weather scenario. Therefore, a cell based environment with a variable longitudinal resolution is simulated and rotated, such that the departure point represents a pole. The A* algorithm considers the best neighbored nodes to find the shortest path using a heuristic costs function. Time dependent parameters as weather can be considered as a function of estimated flown distance and average cruising speed.
The calculated route, the weather data and the aircraft and engine type is used by the aircraft performance model SOPHIA to estimate the vertical trajectory considering the given cruising altitude. Additionally, SOPHIA quantifies the engine emissions. Using the KPIs, TOMATO calculates all cost components and evaluates the trajectory. During the next iteration, TOMATO adjusts the input parameters for the pathfinding module and for SOPHIA to iteratively converge to an optimal trajectory.
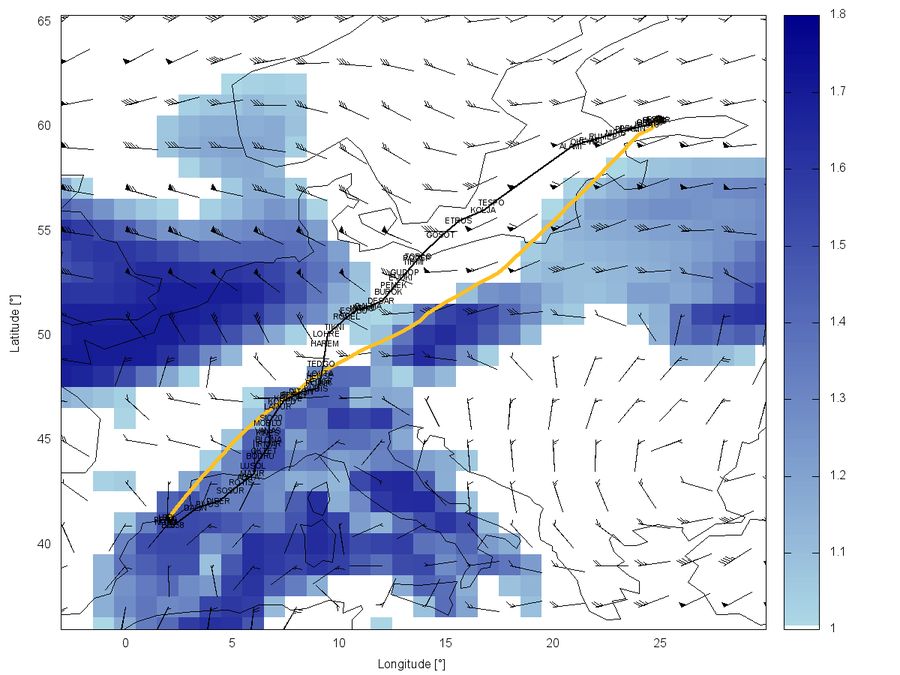
Figure 2: Flight from Barcelona to Helsinki as ATS restricted trajectory (black) based on recent AIRAC cylce and as waypointless optimized trajectory (yellow) at 04.08.2018, 01:00 p.m. Blue colored regions represent ice-supersatured regions resulting in condensation trails, which are considered in multi criteria optimization.
Along with the ambitious SESAR objectives, new aircraft performance models are necessary to calculate and optimize free route aircraft-specific trajectories considering real weather conditions. The aircraft performance model SOPHIA meets these requirements. To consider constant changes in speed and acceleration, the dynamic equation of this unsteady system is solved analytically. Free variables are controlled by an aircraft-specific proportional plus integral plus derivative controller. Therewith, the model is based solely on physical functions (except for the drag polar, which is approximated by the open-source aircraft performance model OpenAP [1]) and calculates only physically possible trajectories. Several aircraft and engine types are included, the aircraft-specific behaviour can be modelled in detail and emissions can be quantified. Figures 3 and 4 show the flight Barcelona-Helsinki and the AIRAC and waypointless scenario each the optimized vertical profile. Blue regions represent ice supersaturated regions, which are mostly avoided by vertical steps. Figures 5 and 6 show the waypointless optimized trajectory of the target and actual air speeds, thrust, and fuel flow.
SOPHIA uses target functions for the trajectory design and calculates the 4D trajectory for fixed time steps. For the definition of the Shared Business Trajectory (SBT) and the Reference Business trajectory (RBT) due to communication with the air traffic stakeholders, the optimized 4D trajectory may have to be converted into waypoints. However, target functions will always be closer to the optimum, especially under consideration of external influences. Without waypoints, the trajectory will not be predictable and difficult to control by Air Traffic Control (ATC). The flight performance model SOPHIA will give all stakeholders the possibility to calculate the desired 4D trajectory and investigate it with respect to conflicts with other stakeholders. For the RBT, ATC has to release the target function, not the waypoints.
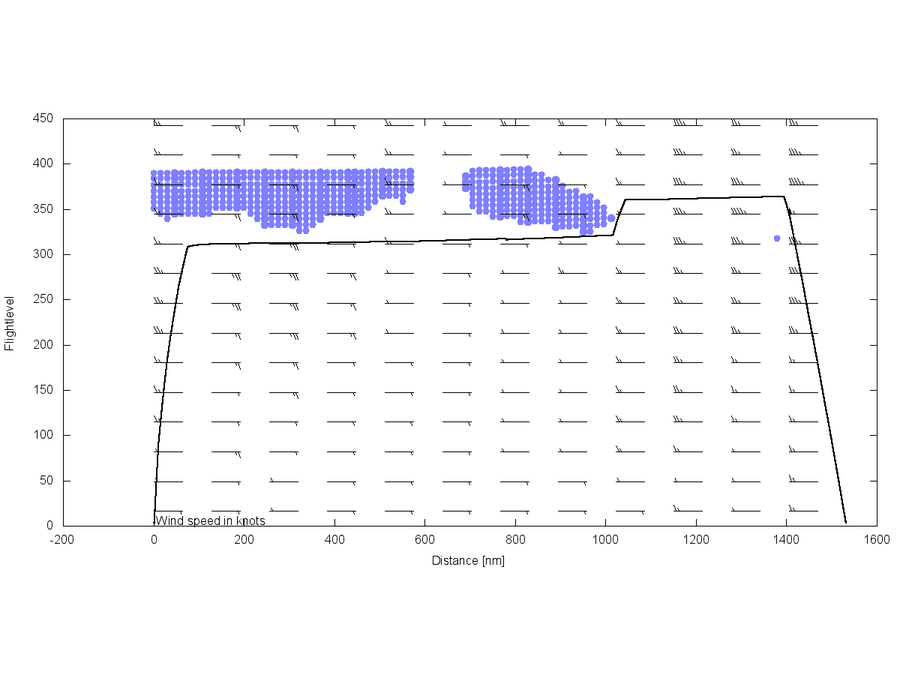
Figure 3: Optimized vertical profile for the AIRAC scenario avoiding ice supersatured regions (blue). Head wind and tail wind components are shown as wind barbs.
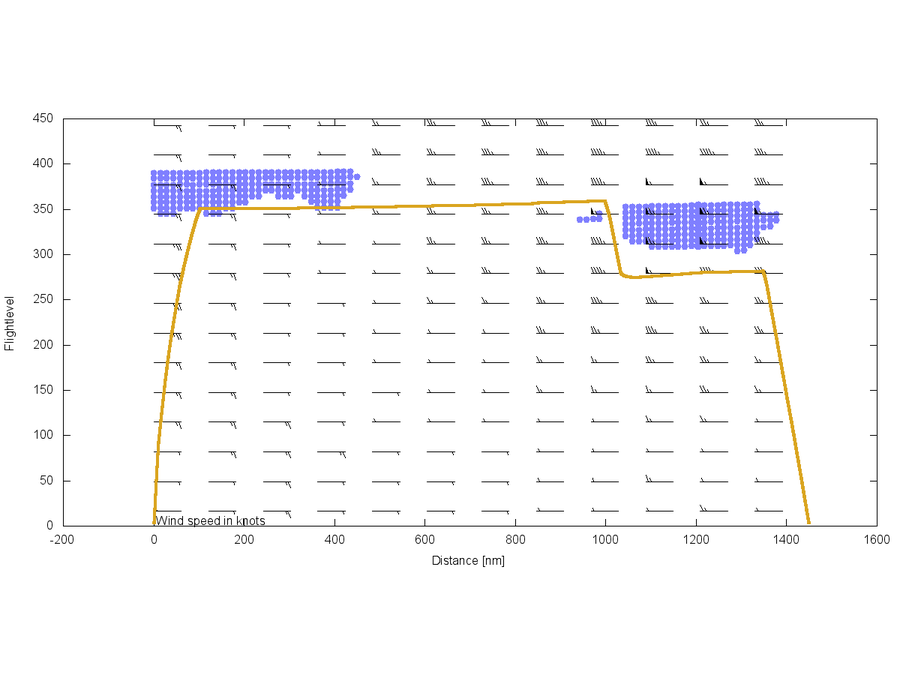
Figure 4: Optimized vertical profile for the waypointless scenario avoiding ice supersatured regions (blue). Head wind and tail wind components are shown as wind barbs.

Figure 5: Target and Actual True Air Speed (m/s) for the waypointless optimized vertical profile.

Figure 6: Thrust (kN) and Fuel Flow (kg/min) for the waypointless optimized vertical profile.
|
[1] |
Sun, J.; Hoekstra, J.M.; Ellerbroek, J. OpenAP: An Open-Source Aircraft Performance Model for Air Transportation Studies and Simulations. Aerospace 2020, 7, 104. https://doi.org/10.3390/aerospace7080104 |
- Jan Evler, Judith Rosenow, Hartmut Fricke, (2022): Airline Schedule Recovery at Hub Airports including Dynamic Cost Indexing and Re-Routing, International Conference on Research in Air Transportation (ICRAT 2022), Tampa, FL
- Thomas Zeh, Martin Lindner, Judith Rosenow, Hartmut Fricke, (2022): Optimization of Departure Routes Beyond Aircraft Noise Abatement, International Conference on Research in Air Transportation (ICRAT 2022), Tampa, FL
Best Paper Award in Trajectory Modeling/Optimization track - Judith Rosenow, Thomas Sachwitz, Shumpei Kamo, Gong Chen and Hartmut Fricke (2022) Aircraft-Type-Specific Impact of Speed Brakes on Lift and Drag Aerospace 2022, 9 (5), 263, https://doi.org/10.3390/aerospace9050263
- Judith Rosenow, Ehsan Asadi, Daniel Lubig, Michael Schultz and Hartmut Fricke (2022), Long Range Air Traffic Flow Management with Flight-Specific Flight Performance, Stats 2022, 5 (1), 312-338;https://doi.org/10.3390/futuretransp2020017
-
Gong Chen, Hartmut Fricke, Ostap Okhrin and Judith Rosenow (2022), Importance of Weather Conditions in a Flight Corridor, Stats 2022, 5 (1), 312-338;https://doi.org/10.3390/stats5010018
-
Judith Rosenow, Gong Chen, Hartmut Fricke, and Yanjun Wang (2021), Factors Impacting Chinese and European Vertical Fight Efficiency, Aerospace 2022, 9(2), 76;https://doi.org/10.3390/aerospace9020076
-
Judith Rosenow, Gong Chen, Hartmut Fricke, Xiaoqian Sun and Yanjun Wang (2021), Impact of Chinese and European Airspace Constraints on Trajectory Optimization, Aerospace 2021 8, 338;https://doi.org/10.3390/aerospace8110338
- Judith Rosenow, Martin Lindner, Joachim Scheiderer (2021), Advanced Flight Planning and the Benefit of In-Flight AircraftTrajectory Optimization Sustainability (2021)13 (3), 1383, https://doi.org/10.3390/su13031383
- Judith Rosenow, Philipp Michling, Michael Schultz, Jörn Schönberger (2020), Evaluation of Strategies to Reduce the Cost Impacts of Flight Delays on Total Network Costs, Aerospace 7 (11), 165, DOI10.3390/aerospace7110165
- Thomas Zeh, Richard Alligier, Judith Rosenow, Hartmut Fricke (2020), Prediction of the Propagation of Trajectory Uncertainty for Climbing Aircraft, 39th Digital Avionics Systems Conference, DASC 2020
- Shumpei Kamo, Judith Rosenow, Hartmut Fricke (2020) CDO Sensitivity Analysis for Robust TrajectoryPlanning under Uncertain Weather Prediction, 39th Digital Avionics Systems Conference, DASC 2020
- Martin Lindner, Judith Rosenow, Thomas Zeh, Hartmut Fricke (2020) In-Flight Aircraft Trajectory Optimization within Corridors Defined by Ensemble Weather Forecasts, Aerospace 7 (10), 144, DOI:10.3390/aerospace7100144
- Judith Rosenow, Philipp Michling, Michael Schultz (2020) Kompensationsstrategien reaktionärer Verspätungskosten, Ingenieurspiegel 3/2020
- Martin Lindner, Judith Rosenow, Stanley Förster, Hartmut Fricke (2019): Potential of integrated flight scheduling and rotation planning considering aerodynamic-, engine-and mass-related aircraft deterioration, CEAS Aeronautical Journal, volume 10, pages755–770(2019) DOI:10.1007/s13272-018-0344-x
- Judith Rosenow, Hartmut Fricke (2019): Condensation Trails in Trajectory OptimizationThirteenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2019), 2019
- Judith Rosenow, Hartmut Fricke (2019): Individual Condensation Trails in Aircraft Trajectory Optimization, Sustainability, Volume 11, Issue 21, DOI: 10.3390/su11216082
- Martin Lindner, Judith Rosenow, Hartmut Fricke (2019): Aircraft trajectory optimization with dynamic input variables, CEAS Aeronautical Journal, https://doi.org/10.1007/s13272-019-00430-0
- Judith Rosenow, David Strunck, Hartmut Fricke (2019): Trajectory Optimization in Daily Operations, CEAS Aeronautical Journal, https://doi.org/10.1007/s13272-019-00429-7
- Judith Rosenow, Hartmut Fricke (2019): Impact of multi-criteria optimized trajectories on European airline efficiency, safety and airspace demand, Journal of Air Transport Management, Volume 28, pp. 133-143 https://doi.org/10.1016/j.jairtraman.2019.01.001
- Thomas Zeh, Judith Rosenow, Hartmut Fricke (2019): Interdependent Uncertainty Handling in Trajectory Prediction, Aerospace, Volume 6, Issue 12. DOI: https://doi.org/10.3390/aerospace6020015
- Judith Rosenow, Marco Berger, Martin Lindner, Hartmut Fricke (2019) Trajektorienoptimierung in der Luft, Ingenieurspiegel 3/2019
- J Rosenow, M Schultz (2018)Coupling of turnaround and trajectory optimization based on delay cost 2018 Winter Simulation Conference (WSC), 2273-2284
- Judith Rosenow and Michael Schultz (2018) 4D Trajectory Prediction with Stochastic Input Parameters, Advanced Aircraft Efficiency in a Global Air Transport System (AEGATS’18), Toulouse, France
- Judith Rosenow, Stanley Förster, Martin Lindner. Hartmut Fricke (2018): Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility, Journal of Air Transportation, Volume 27, Issue 1. DOI: https://doi.org/10.2514/1.D0086
- Judith Rosenow, David Strunck, Hartmut Fricke (2018): Free Route Airspaces in Functional Air Space Blocks Sixth SESAR Innovation Days, Salzburg
- Judith Rosenow, David Strunck, Hartmut Fricke (2018): Trajectory Optimization in Daily Operations, 8th International Conference on Research in Air Transportation, Castelldefels
- Judith Rosenow, Stanley Förster, Martin Lindner, Hartmut Fricke (2018): Multicriteria-Optimized Trajectories Impacting Today’s Air Traffic Density, Efficiency, and Environmental Compatibility, AIAA Journal, DOI: https://arc.aiaa.org/doi/abs/10.2514/1.D0086
- Martin Lindner, Thomas Zeh, Hartmut Fricke (2018): Reoptimization of 4D-Flight Trajectories During Flight Considering Forecast Uncertainties, 67. DGLR Kongress, Friedrichshafen
- Judith Rosenow, David Strunck, Hartmut Fricke (2018): Trajectory Optimization in Daily Operations, 8th International Conference on Research in Air Transportation, Castelldefels
- Martin Lindner, Judith Rosenow, Hartmut Fricke (2018): Dynamically Optimized Aircraft Trajectories Affecting the Air Traffic Management, 8th International Conference on Research in Air Transportation, Castelldefels
- Judith Rosenow, Hartmut Fricke, Tanja Luchkova, Michael Schultz (2018): Minimizing contrail formation by rerouting around dynamic ice-supersaturated regions, Aeronautics and Aerospace Open Access Journal, Volume 2, Issue 3
- Judith Rosenow, Hartmut Fricke, Michael Schultz (2017): Air traffic simulation with 4D multi-criteria optimized trajectories, Winter Simulation Conference 2017, Las Vegas
- Judith Rosenow, Martin Lindner, Hartmut Fricke (2017): Impact of climate costs on airline network and trajectory optimization: a parametric study, CEAS Aeronautical Journal, Volume 8
- Judith Rosenow and Hartmut Fricke (2017): Impact of Multi-critica Optimized Trajectories on European Airline and Network Efficiency, Air Transport Research Society World Conference 2017, Antwerp
- Judith Rosenow, Stanley Förster, Martin Lindner, and Hartmut Fricke (2017): Impact of Multi-critica Optimized Trajectories on European Air Traffic Density, Efficiency and the Environment, Twelfth USA/Europe Air Traffic Management Research and Development Seminar (ATM2017), Seattle
-
Judith Rosenow, Stanley Förster, and Hartmut Fricke (2016): Continuous Climb Operations with Minimum Fuel Burn, Sesar Innovation Days, Delft
-
Stanley Förster, Judith Rosenow, Martin Lindner and Hartmut Fricke (2016): A toolchain for optimizing trajectories under real weather conditions and realistic flight performance, Greener Aviation, Brussels
-
Martin Lindner, Stanley Förster, Judith Rosenow, and Hartmut Fricke (2016): Ecological Impact Of Air Traffic Control En-Route Charging Zones From Multi-Criteria Optimized Flight Paths, Greener Aviation, Brussels
-
Judith Rosenow and Hartmut Fricke (2016): Flight Performance Modeling to optimize Trajectories, DGLR Kongress, Braunschweig
-
Judith Rosenow, Stanley Förster, Martin Lindner, and Hartmut Fricke (2016): Multi-objective trajectory optimization, International Transportation, Special Edition 1, Volume 68
-
Judith Rosenow, Martin Lindner, and Hartmut Fricke (2015): Assessment of air traffic networks considering multi-criteria targets in network and trajectory optimization, DGLR Kongress, Rostock