Steuerung mobiler Roboter
| Modulname: | Robotik/Steuerung mobiler Roboter |
| Modulnummer: | EuI-ET-E-StRob EuI-IST-E-StRob EuI-MT-E-StRob |
| Modulname: | Robotik Vertiefung /Steuerung mobiler Roboter |
| Modulnummer: | MT-A08-V |
| Lehrbeauftragter: | Prof. Dr. techn. K. Janschek |
| Übungsleiter: | Dr.-Ing. Eric Dueblenk |
| Anmeldung/Downloads: | weiter zu OPAL |
| Ankündigung WS 2026/27 Steuerung mobiler Roboter | |||
|---|---|---|---|
| Vorlesung: | xx | x. DS | xx |
| Übung/Praktikum: | xx | x. DS | xx |
| Beginn: | xx. Oktober 2026 | x. DS | xx |
Inhalt des Lehrfaches
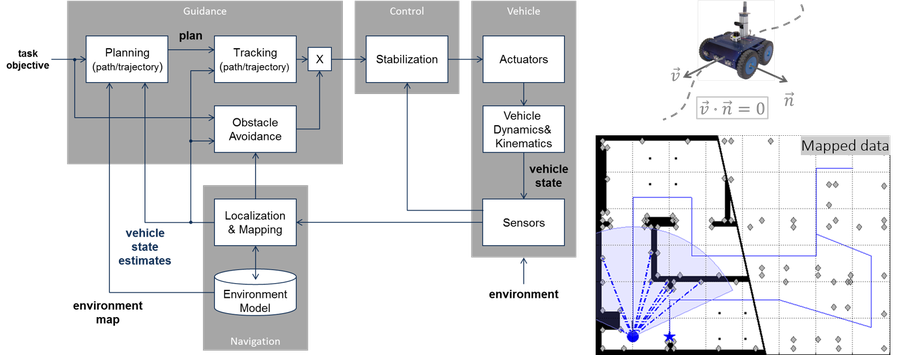
This course aims for getting basic understanding of in mobile robotics from the systems point of view in terms of elementary functions (guidance, navigation, control) and their allocation and interaction within a closed loop system.
VORLESUNGEN
KINEMATICS: motion dynamic models; motion dynamic constraints; wheeled robots in 2D planar environment.
LOCALIZATION: coordinate frames and transformations; dead reckoning; range-bearing; revision courses “Introduction to State Space” and “Elements of Kalman Filtering”; sensor fusion; simultaneous localization and mapping - SLAM, observability and consistency, filter performance evaluation.
MAPPING: terms and definitions; selected map types; mapping with known pose – occupancy grid maps.
GUIDANCE: general aspects; controllability; differential flatness; collision avoidance; local planning methods; global planning – deterministic methods; global planning – randomized methods.
TRACKING CONTROL: general control structure; nonlinear tracking controller synthesis.
ÜBUNGEN
Own development of selected algorithms and testing in a preconfigured simulation environment.
LV Mobile Robot Control - Student Software Project © K. Janschek
Beleg / Software Project
- Implementation of own sensor fusion filter (EKF) in Matlab for localization with IMU and GPS data derived from a smartphone
2D Dead Reckoning Localization with Odometry © M. Tkocz
2D Dead Reckoning Localization with Odometry
- 3 DOF pose estimation
- Note: accumulated estimates with increasing drift
2D Range-Bearing Localization with Landmarks © M. Tkocz
2D Range-bearing Localization with Landmarks
- 3 DOF pose estimation
- Note: instantaneous estimates with large and bounded estimation errors
2D Localization with EKF Sensor Fusion (odometry + landmarks) © M. Tkocz
2D Localization with EKF Sensor Fusion
- 3 DOF pose estimation
- Note: small and bounded estimation errors due to fusion of odometry and range-bearing measurements in an Extended Kalman Filter (EKF)
2D EKF-SLAM © Ch. Yao
2D EKF SLAM
- 3 DOF pose estimation + landmark mapping = Simultaneous Loclaization and Mapping (SLAM)
- Note: small and bounded estimation errors due to fusion of odometry and range-bearing measurements in an Extended Kalman Filter (EKF)