Subproject 7: Modeling and metrological evaluation of adaptive components in I-FRCs using electro-mechanical network models
Motivation
The deformation behavior of fiber rubber composites (FRCs) can be monitored and actively controlled by integrating appropriate actuators. This is achievable, for instance, by SMA (shape memory alloy) wires that are integrated into the structure using textile-technical methods (TP1). The simultaneous integration of actuators and sensors now allows to create adaptive elastomer devices where the stiffness can be adjusted and, hence, the deformation state can be changed specifically. For that purpose, electro-mechanical network models should be developed, which describe both the mechanical structure and the actuator functions. The verification of the models will be based on the metrological characterization of I-FRC demonstrators.
State of the art and preliminary research
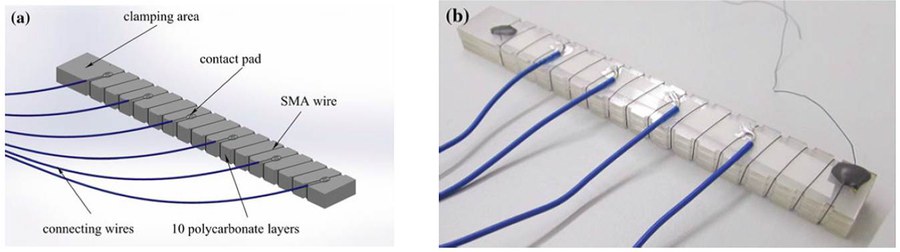
The targeted stiffness control of mechanical construction elements has been subject of research for a long time, e.g. with respect to so-called „morphing structures”. In the framework of the Saxon Cluster of Excellence ECEMP (European Centre for Emerging Materials and Processes), a particular approach was considered where the sliding of multi-layer stacks was influenced leading to a stiffness change of almost two orders of magnitude (see figures).
Moreover, electro-mechanical network models for bimorph bending beams were proposed that can be applied to circuit simulation tools. This allows for their usage in complex control systems. Theoretical system principles were described for the application of the force-compensation method, with which the sensitivity and the long-term stability of polymer-based sensors can be improved decisively.
Scientific questions and project objectives
This project focusses on structure- and material-specific network models for adaptive components of I-FRCs that describe the interaction between relevant input and output parameters. They should enable the control of complex spatial deformation states of I-FRCs. One particular goal lies in the evaluation of the functional interactions between mechanical (structure), electrical (integrated actuators) and thermal (heat loss) quantities. The analytical models should describe the adaptive properties with sufficient accuracy and robustness with respect to disturbing influences, e.g. temperature gradients. In collaboration with project TP8, which is concerned with the spatially distributed sensor properties of I-FRCs, electro-mechanical sensor-actuator network models are targeted that enable tailored control concepts in real time for autonomous I-FRCs.
Contact
Institute of Solid State Electronics (IFE), Faculty of Electro and Computer Engineering at TU Dresden
 © IFE/TUD
© IFE/TUD
Mr Prof. Dr.-Ing. habil. Gerald Gerlach
Institutsdirektor
Send encrypted email via the SecureMail portal (for TUD external users only).
Visiting address:
Günther-Landgraf-Bau 7-E01b Mommsenstraße 15
01069 Dresdem