Subproject 9: Open- and closed-loop control for system integration in interactive fiber rubber composites
Motivation
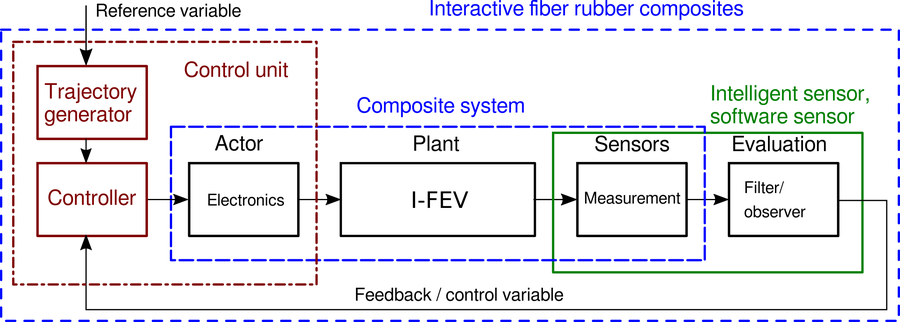
The mechanical properties of interactive fiber rubber composites with smooth as well as switching properties vary significantly under external strain (traction force, pressure, temperature). To generate spatially nonlinear, reproducible deformations of complex interactive fiber rubber composites, a combination of adaptive and robust control schemes is necessary. The active control of deformations requires real-time supervision and spatial detection of the actual state. Using adaptive control together with sensor-based feedback, it is aimed at compensating as far as possible for manufacturing tolerances, fatigue, and further undesired effects (e.g. dependence on temperature).
State of the art and preliminary research
Based on a rigorous nonlinear controller design, many real-world systems can be steered into the desired behavior. The model-based determination of a system's state can be carried out by augmenting sensors with appropriate filters. Such combinations are often called intelligent or software sensors. Moreover, the construction of sensors that rely on compensation principles requires an underlying controller design. A position controller for an adaptive fiber rubber composite has already been successfully designed.
Scientific questions and project goals
The aim of the project is the investigation and development of robust real-time algorithms for the combined open- and closed-loop tracking control of interactive fiber rubber composites. In particular, we want to achieve highly dynamic and complex deformation patterns. For the controller design, the nonlinear transfer characteristics (including hysteresis) shall be taken into account. Our research includes the identification and real-time modeling of varying process properties. We aim at improving filter and observer techniques for the model-based estimation of these quantities. This includes the usage of methods involving fault detection and isolation, since these approaches are closely linked to filter and observer design. Robust controller design methods have to be developed in order to achieve the desired functionality of the considered modules, even in presence of parameter uncertainties, tolerances, and drift. The controller design could be carried out using energy-based control concepts, sliding mode control, stabilization in terms of Lyapunov, or passivity-based techniques. These approaches require a scientifically challenging stability analysis resulting in robust real-time control algorithms.
Contact
Institute of Control Theory (RST), Faculty of Electrical and Computer Engineering at TU Dresden
 © K. Röbenack
© K. Röbenack
Professor
NameMr Prof. Dr.-Ing. habil. Dipl.-Math. Klaus Röbenack
Director of the institute
Send encrypted email via the SecureMail portal (for TUD external users only).
Certificate of DFN-PKI for encrypted email communication.
SHA1 Fingerprint: 5D:0B:FB:6F:92:2B:87:36:F5:F5:F0:48:64:77:66:8C:DB:58:56:7A
Institute of Control Theory
Institute of Control Theory
Visiting address:
Institutsgebäude S7a, Room 405 (secretariat 406) Georg-Schumann-Straße 7a
01187 Dresden