Bahnantriebe (MKS)
|
Volltitel: |
Bahnantriebe (MKS) |
|
Bearbeiter: |
Dr.-Ing. Thomas Rosenlöcher (TU Dresden, IMM) |
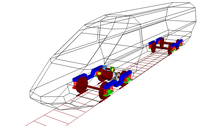
| Anliegen: | Die Kontaktbedingungen zwischen Laufrad und Schiene können für die fahrdynamische Simulation von Schienenfahrzeugen durch komplexe Theorien mit unterschiedlichem Detaillierungsgrad beschrieben werden. Aufgrund der langjährigen Erfahrungen mit kommerziellen Simulationsprogrammen, sind die Untersuchungen unterschiedlichster Fahrzustände von auf Schienen betriebenen Fahrzeugen ein fester Bestandteil des Produktentwicklungsprozesses. Um die detaillierten Informationen zu den wirkenden dynamischen Kräften im Rad-Schiene-Kontakt auch bei der Entwicklung der zwischen Motor und Radsatz eingesetzten Getriebe zu berücksichtigen, können mit den Möglichkeiten der Mehrkörpersystem-Simulation komplexe Gesamtmodelle erarbeitet werden. Diese Modelle vereinen die detaillierte Abbildung der Kontaktbedingungen zwischen Rad und Schiene, der Getriebekomponenten, des elektrischen Antriebes und der Regelung. Durch die Variation von Reglerparametern und der Gegenüberstellung mit Eigenfrequenzen des Systems können unterschiedliche Einflussgrößen aufgezeigt werden, die zu einer Überhöhung der Belastungen im Getriebe führen können. |
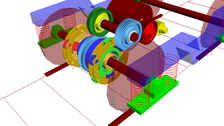
| Vorgehensweise: | Zur Erweiterung eines Modells für die fahrdynamische Simulation zum vollständigen elektro-mechanischen Gesamtmodell wird zwischen motorseitiger Eingangswelle und der Hohlwelle als Verbindungselemente zur Laufradwelle zusätzlich das eingesetzte Getriebe modelliert. Der Motor treibt über eine Ritzelwelle die zweistufige Räderkette an, die am letzten Rad durch eine Welle mit einem axial versetzten, doppelschrägverzahnten Zahnradpaar verbunden ist. Diese Verzahnung überträgt das Antriebsmoment auf die im Gehäuse gelagerte Hohlwelle. Um das Gewicht des Getriebes vom eigentlichen Radsatz zu entkoppeln und die ungefederten Massen des Radsatzes zu reduzieren, erfolgt die weitere Übertragung des Drehmomentes über eine elastische Lenkerkupplung. |
| Ergebnis: | Die durchgeführten Untersuchungen können deutliche Abhängigkeiten zwischen den Belastungen für die Getriebekomponenten und den Zuständen im Rad-Schiene-Kontakt sowie der Regelung des Elektromotors nachweisen, die nicht als allgemein gültige Aussage formuliert werden können, sondern unter Umständen für jeden Anwendungsfall neu zu untersuchen sind. Durch die Einbindung detaillierter Getriebemodelle in komplexe Simulationsmodelle des Rad-Schiene-Kontaktes können die Rückkopplungen zwischen beiden Systemen und der Regelung des Elektromotors analysiert werden, die gegebenenfalls zu Belastungen führen welche auf Grundlage angenommener Nennlasten unberücksichtigt bleiben. Vor allem für die entwicklungsbegleitende Definition von Lastannahmen oder auch für die Festlegung von Regelungsparametern können elektro-mechanische Modelle zur fahrdynamischen Simulation hilfreiche Informationen bereitstellen. |

© IMM

© IMM

© IMM