SteriBot - Entwicklung eines Automatisierungssystems für die Sterilitätsprüfung von Radiopharmazeutika
Sterilitätsprüfungen von pharmazeutischen Wirkstoffen sind ein häufiger Auftragsgegenstand in Routinelaboren und in der Bearbeitung sowohl zeitkritisch als auch zeitintensiv. Die Fragestellung verschärft sich sobald es sich um radioaktive Wirkstoffe handelt, da Strahlenexposition für den Prüfer schädlich sein kann. Es gilt also die Kontaktzeit des Prüfpersonals weitgehend zu reduzieren und dabei möglichst auch die notwendige Dauer der Prüfung zu verringern.
Multiperspektive Bildaufnahmen von Gegenständen und deren vollautomatische, dynamische Analyse, die sogenannte Computer Vision, sind in unserem täglichen Leben omnipräsent. Im Bereich der Lebenswissenschaften und Medizintechnik werden solche leistungsstarken, photogrammetrischen Systemansätze bisher jedoch kaum angewendet, da die technologischen Grundvoraussetzungen noch nicht ausentwickelt sind.
Ziel des Verbundprojekts ist es, im Einklang mit der Innovationsstrategie des Freistaat Sachsen, diese Grundvoraussetzungen zu schaffen und einen Demonstrator für ein kompaktes, in eine geeignete Werkbank einbringbares System zur automatischen Sterilitätsprüfung bereitzustellen und damit erstmals die software-gestützte, vollautomatische Probenprüfung von Radiopharmazeutika zu ermöglichen. In der Konsequenz wird der menschliche Prüfer nicht mehr direkt an der Probe eingesetzt und schädliche Strahleneinwirkung vermieden.
Innovation innerhalb des geplanten Verbundprojekts ist einerseits das automatische Zu- und Abführen von radioaktiven Proben in geeigneten Behältern und andererseits die automatische Probenbearbeitung gestützt auf dynamisch erzeugte 3D-Modelle der Probenbehälter mittels photogrammetrischer Methoden. Das neuartige System soll schließlich in einem Routinelabor für die Sterilitätsprüfung von Radiopharmazeutika – dem RADIOSTER der CUP Laboratorien Dr. Freitag GmbH getestet werden.
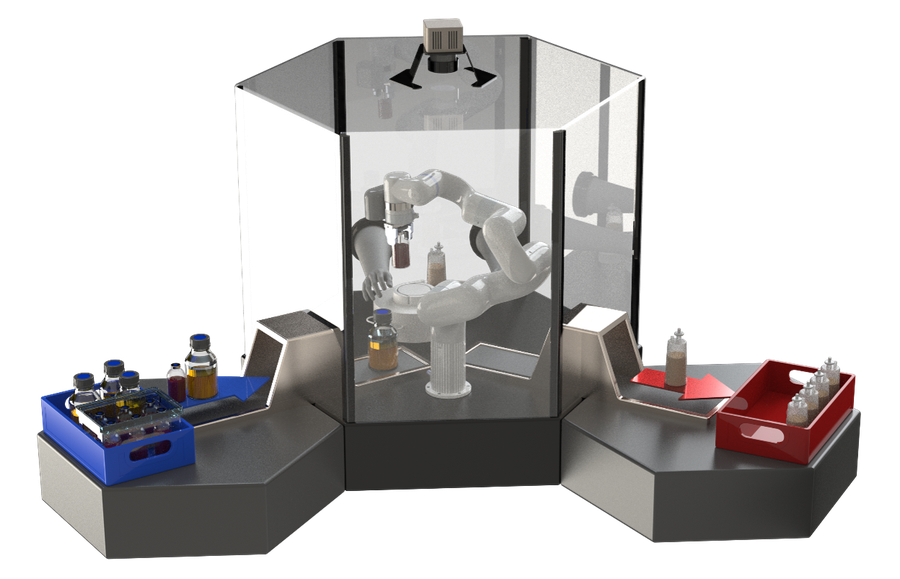
Designstudie zum Gerätesystem SteriBot bestehend aus Probenzu- und –abführung sowie dem Modul für die Durchführung der Sterilprüfung.
Die größte Herausforderung auf der Seite des Erzeugens der 3D-Modelle besteht in der Entwicklung einer Methode die transparenten und reflektierenden Strukturen der Probenbehälter optisch so abzubilden, dass sich präzise 3D-Informationen ableiten lassen. Die größte Herausforderung auf der Seite der Entwicklung einer Softwareumgebung ist die integrierte Analyse der Bilddaten in Quasi-Echtzeit auf einem industriellen Mikrocontroller um auf Basis der Bildanalyseergebnisse den Probenbehälter und die darin befindliche Probe unmittelbar zu bearbeiten. Weiterhin muss das zu entwickelnde Robotiksystem sowohl in Mechanik als auch Software entwickelt werden, das unmittelbaren Zugriff auf die erzeugten 3D-Modelle besitzt und die Proben mit höchster Genauigkeit bearbeitet. Mit der Erarbeitung einer Technologielösung zu dieser Fragestellung beschäftigen sich dabei die Medizin- und Labortechnik Engineering GmbH und die TU Dresden, Forschungsgruppe SmartLab-Systeme.
Mit dem vorwettbewerblichen Nachweis der Funktionstüchtigkeit eines solchen autonom an radiopharmazeutischen Proben navigierenden Robotersystems lassen sich vielfältige Anwendungen auch in weiteren Bereichen der Medizintechnik ableiten, wie z. B. für autonome OP-Roboter.
Projektfinanzierung:

Sächsische Aufbaubank - Verbundprojektförderung
Förderkennzeichen: 100554940

Projektleiter:
 © Mann
© Mann
Wissenschaftlicher Mitarbeiter
NameDr.-Ing. Felix Lenk
Leiter SmartLab-Systeme
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Projektmitarbeiter:
 © Mann
© Mann
Wissenschaftlicher Mitarbeiter
NameDipl.-Ing. Christoph Otto
SmartLab-Systeme, Laborautomation
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Kooperationspartner:
CUP Laboratorien Dr. Freitag GmbH
Medizin- und Labortechnik Engineering GmbH Dresden
Projektlaufzeit:
01.06.2021 - 31.10.2022