SteriBot - Development of an automation system for sterility testing of radio pharmaceuticals
Sterility testing of active pharmaceutical ingredients is a frequent subject of an order in routine laboratories and is both time-critical and time-consuming in processing. The question becomes more acute as soon as radioactive substances are involved, since radiation exposure can be harmful to the examiner. It is therefore important to reduce the contact time of the test personnel as much as possible and at the same time to reduce the necessary duration of the test as far as possible.
Multi-perspective images of objects and their fully automatic, dynamic analysis, the so-called computer vision, are omnipresent in our daily life. In the field of life sciences and medical technology, however, such high-performance, photogrammetric system approaches have hardly been used to date, since the basic technological requirements have not yet been fully developed.
The aim of the joint project is to create these basic requirements in line with the innovation strategy of the Free State of Saxony and to provide a demonstrator for a compact system for automatic sterility testing that can be installed in a suitable workbench, thus enabling the software-supported, fully automatic sample testing of radiopharmaceuticals for the first time . As a result, the human tester is no longer used directly on the sample and harmful exposure to radiation is avoided.
Innovation within the planned joint project is on the one hand the automatic supply and removal of radioactive samples in suitable containers and on the other hand the automatic sample processing based on dynamically generated 3D models of the sample containers using photogrammetric methods. The new system will eventually be used in a routine laboratory for sterility testing of radiopharmaceuticals - the RADIOSTER of the CUP Laboratorien Dr. Freitag GmbH.
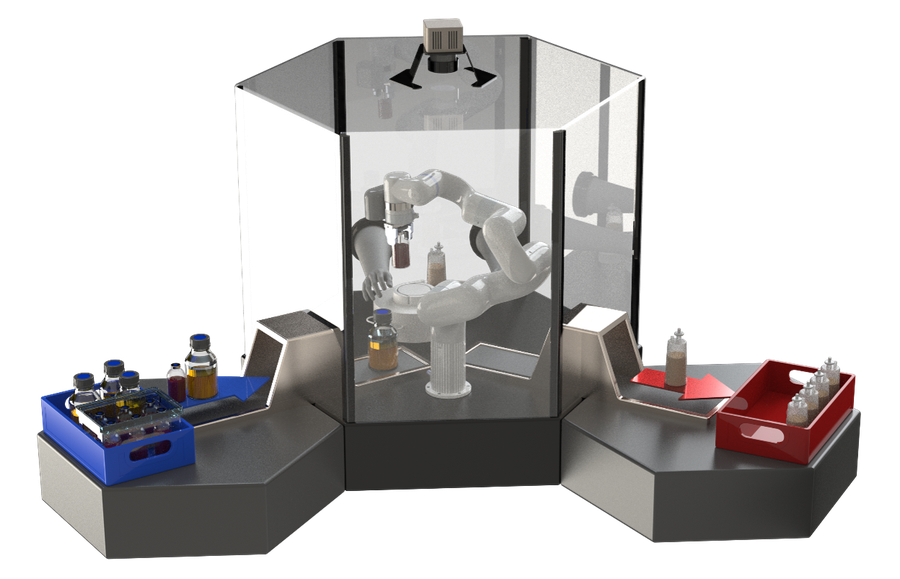
Design study of the SteriBot system consisting of sample loading and unloading as well as a modul for sterile testing.
The greatest challenge when it comes to creating the 3D models is to develop a method for optically mapping the transparent and reflective structures of the sample containers in such a way that precise 3D information can be derived. The greatest challenge when it comes to developing a software environment is the integrated analysis of the image data in quasi real-time on an industrial microcontroller in order to process the sample container and the sample contained therein immediately based on the image analysis results. Furthermore, the robotic system to be developed must be developed both mechanically and software that has direct access to the generated 3D models and processes the samples with the highest accuracy.
The Medizin- und Labortechnik Engineering GmbH and the TU Dresden, research group SmartLab systems, are working on the development of a technological solution to this question. With the pre-competitive proof of the functionality of such a robot system that navigates autonomously on radiopharmaceutical samples, a variety of applications can also be derived in other areas of medical technology, such as e.g. for autonomous surgical robots.
Project funding:

Sächsische Aufbaubank - Verbundprojektförderung
grant number: 100554940

Project head:
 © Mann
© Mann
Project researcher
NameDr.-Ing. Felix Lenk
Head of SmartLab-systems
Send encrypted email via the SecureMail portal (for TUD external users only).
Project staff:
 © Mann
© Mann
Project researcher
NameDipl.-Ing. Christoph Otto
SmartLab-systems, lab automation
Send encrypted email via the SecureMail portal (for TUD external users only).
Cooperation partners:
CUP Laboratorien Dr. Freitag GmbH
Medizin- und Labortechnik Engineering GmbH Dresden
Project term:
01.06.2021 - 31.10.2022