An linearen Führungen kletterfähiger Roboter zur Bauwerksinspektion
Inhaltsverzeichnis
Projektdaten
| Titel | Title Entwicklung eines kletterfähigen Roboters an linearen Führungen zur Bauwerksinspektion | Development of a climbing robot at linear guidances for building monitoring Förderer | Funding BMWi; PT: Arbeitsgemeinschaft industrieller Forschungsvereinigungen „Otto von Guericke“ e.V. (AiF) Zeitraum | Period 09.2012 – 11.2014 Leiter | Project Manager Enrico Lorenz M.Sc., Dr.-Ing. Frank Schladitz, Dr.-Ing. Torsten Hampel Bearbeiter | Contributor Dr.-Ing. Thoralf Schober Projektpartner | Project Partners Fertigungs- und Automatisierungstechnik GmbH, Dresden |
Bericht aus dem Jahrbuch 2014
Roboter im Bauwerksmonitoring
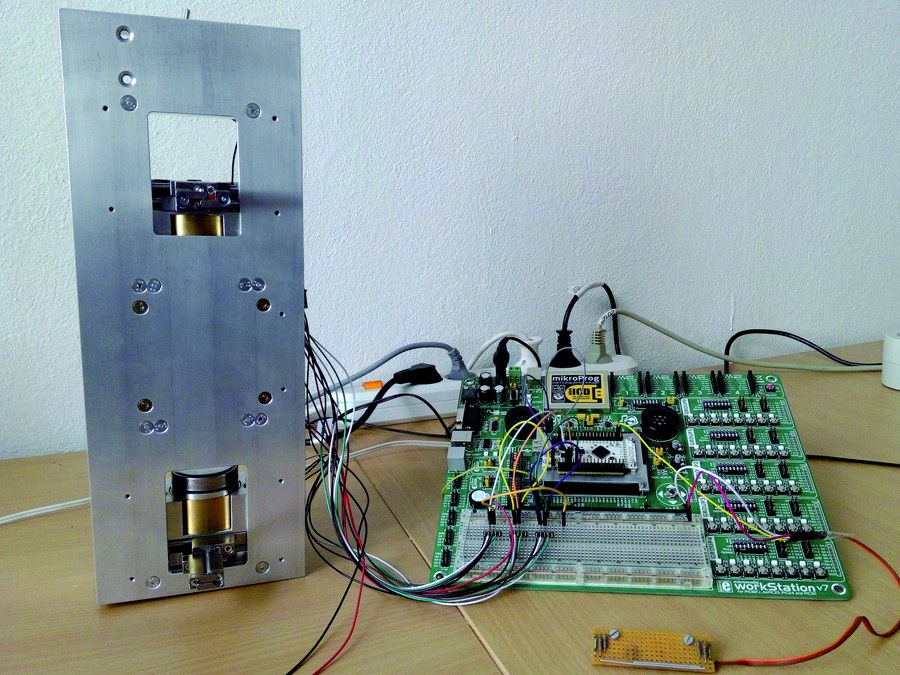
Roboter mit Elektroniktestfeld
Zunehmend werden Roboter, ausgestattet mit Sensoren und Kameras, im Bauingenieurwesen zum Bauwerksmonitoring eingesetzt, um kostengünstig Daten zur Planung von Sanierungs- oder Umnutzungsmaßnahmen zu gewinnen. Sie ermöglichen selbst komplette Scans von schwer erreichbaren Bauwerksoberflächen.
Im Rahmen eines von der AiF geförderten Vorhabens wurde zu diesem Zweck der Roboter „CLIBOT“ entworfen und als Demonstrator gebaut, der sich an Seilen, Drähten oder Litzen kletternd zu seinem Einsatzort bewegt und in der Lage ist, die überkletterten Bereiche fotografisch festzuhalten. CLIBOT wurde im Jahr 2014 fertiggestellt und hat in ersten Versuchen seine Einsatzfähigkeit bewiesen.
Grundlegend dafür war die Entwicklung eines Greifers, der sich mit geringem Energieverbrauch sicher am Klettermedium festhalten kann. In einem eigens dazu entwickelten Prüfstand konnte ein optimales Design gefunden werden. Das Grundgerät des Roboters besteht aus zwei Greifern dieses Typs, die sich durch den Fahrantrieb alternierend auf und ab bewegen, sich öffnen und schließen und so a la Stange klettern eine Auf- und Abwärtsbewegung des Roboters ermöglichen.
Die rasante Entwicklung der Smartphones mit ihrer ausgezeichneten Haptik, hohen Performance und geringen Abmessungen prädestinierten diese Geräte für den Robotereinsatz, so auch beim hier vorgestellten Projekt. Ein 5“-Android-Handy mit einer Schnittstelle zur Hardware („IOIO“) liefert die Hardware zur Steuerung. Eine speziell für diese Zwecke geschriebene App realisiert die „Intelligenz“. Sie steuert die Bewegungsabläufe des Roboters mit seinen Greifern und sendet über WLAN ein Livebild von der integrierten Kamera. Die Parametrierung und die Konfigurierung auf die konkreten Einsatzbedingungen sind ebenfalls durch die Software möglich.
Durch die Daten- und Kommandoübertragung via WLAN kann die Fernsteuerung des Roboters durch ein beliebiges Smartphone, Tablett oder Notebook vorgenommen werden. Der in letzteren Geräten vorhandene Webbrowser bildet die Steueroberfläche inklusive eines Livebildes der integrierten Kamera ab und sendet Kommandos zur Steuerung oder zum Auslösen eines Fotos an den Roboter CLIBOT. Das Livebild zeigt die vom Roboter überfahrene Oberfläche an und erleichtert das präzise Anfahren der Messstellen auch unter Baustellenbedingungen.
Bericht aus dem Jahrbuch 2013
Roboter im Bauwerksmonitoring

Testgreifer.
Zunehmend werden Roboter, ausgestattet mit Sensoren und Kameras, im Bauingenieurwesen zum Bauwerksmonitoring eingesetzt, um kostengünstig Daten zur Planung von Sanierungs- oder Umnutzungsmaßnahmen zu gewinnen. Mittlerweile sind selbst komplette Scans von schwer erreichbaren Bauwerksoberflächen möglich. Vor diesem Hintergrund wurde im vergangenen Jahr ein von der AiF gefördertes Vorhaben begonnen, in dem der bereits als „proof of concept“ geschaffene Roboter CLIBOT, der sich an Seilen, Drähten oder Litzen kletternd zu seinem Einsatzort bewegt, weiter zu einem für die industrielle Produktion geeigneten Demonstrator entwickelt werden soll.
Grundlegend ist für den Kletterroboter ein Greifer zu entwickeln, der das Klettermedium sicher fasst, die Position des Gerätes ohne abzurutschen hält, dabei wenig Energie verbraucht und beim Öffnen der Klauen aus Sicherheitsgründen das Seil nicht verlässt. Vom Projektpartner FAD wurden ein Testmuster eines solchen Greifers sowie ein Prüfstand zur Ermittlung der notwendigen Greifkraft gebaut. An unserem Institut wurden die für Greiferdesign und -produktion notwendigen Parameter ermittelt. Weiterhin mussten geeignete Befestigungen für die Klettermedien entwickelt werden, um beispielsweise in Gewölben oder an Pfeilern entlang, die Unterseiten von Brücken erklettern zu können.
Das Kinematikkonzept des Roboters wurde unter Einbeziehung der neuen Greifer aufgestellt und befindet sich derzeit in der Fertigung. Der Roboter wird nun robuster und wetterunabhängiger sein und zuverlässiger auch schwerer zugängliche Einsatzorte erreichen können.
Die heute verfügbare, leistungsfähige Handytechnik wird für die Robotersteuerung genutzt werden. Ausgezeichnete Haptik, hohe Performance und geringe Abmessungen prädestinieren diese Geräte für die Robotik. Die Steuerung wurde daher auf der Basis eines Handys als Steuercomputer im Roboter realisiert. Ein 7-Zoll-Tablet dient als Fernsteuerung und optional ein Notebook als Steuercomputer. Das Roboterhandy steuert die Bewegungsabläufe des Roboters mit seinen Greifern und sendet von seiner integrierten Kamera über WLAN ein Livebild. Das Handy ermöglicht weiterhin eine umfangreiche Konfigurierung der Robotersoft- und Hardware sowie der drahtlosen Verbindungen. Vom Tablet aus werden über Bluetooth das Steuerhandy und damit der Roboter vom Boden aus ferngesteuert. Das Livebild zeigt die vom Roboter überfahrene Oberfläche und erleichtert das präzise Anfahren der Messstellen auch unter Baustellenbedingungen.
Bericht aus dem Jahrbuch 2012
Roboter kommen überall hin

CLIBOT im Dresdner Zwinger
In den vergangenen zwei bis drei Jahrzehnten haben sich mobile Roboter rasant entwickelt. Ob zum Mars oder in die Meerestiefen, die unterirdischen Welten der Kanäle, das Innere des Menschen – nichts ist vor Robotern sicher, alles kann inspiziert werden.
Für das Bauwesen wünschenswert wären Roboter, die, ausgestattet mit Sensoren und Kameras, autark an Gebäuden oder Brücken klettern könnten und so eine bequeme Inspektion von Oberflächen, Lagern, Beschichtungen o. ä. an schwer zugänglichen Stellen erlauben. Mit derartigen Robotern ließen sich beispielsweise kostengünstig Daten zur Planung von Sanierungs- oder Umnutzungsmaßnahmen gewinnen.
Vor diesem Hintergrund wurde ein Versuchsmuster des Roboters „CLIBOT“ entwickelt, der an Seilen, Drähten, Rohren oder Säulen zu einem Inspektionsort klettern kann. Mit Greifarmen und -zangen fasst der Roboter das Klettermedium und bewegt sich daran auf und ab. Eine Batterie liefert die notwendige Energie. Das Zusammenspiel des Greifens und Loslassens des Seiles und die dazu gehörigen Armbewegungen – die ans Seilklettern im Sportunterricht erinnern – steuert ein Mikrocontroller. Über eine Funkfernbedienung erhält der Controller die Fahrbefehle zum Auf- und Abklettern.
Bisher wurde der Roboter bereits zur visuellen Inspektion in einem Gebäude verwendet, wozu er mit einer Kamera ausgestattet war, deren Livebild über Funk übertragen wurde. So konnte einerseits der Roboter positioniert werden. Andererseits ließen sich via Funkbefehl auch Fotos von der befahrenen Gebäudeoberfläche zur Beurteilung ihres Zustandes „schießen“.
Mit dem Muster von „CLIBOT“ konnten wir demonstrieren, dass mit Robotern auf effiziente Art und Weise ein sicheres Erreichen von Gebäudeinnen- und -außenflächen sowie eine zuverlässige Datenerfassung möglich sind. Die bisherigen Ergebnisse waren so aussichtsreich, dass eine weitere Entwicklung in Richtung eines industriell herstellbaren Musters sowie der Verbesserung des Greifprinzips und der Ausstattung des Roboters mit Messtechnik als äußerst wünschenswert erachtet wurden. Gemeinsam mit einem kompetenten Dresdner Unternehmen wurde im Sommer 2012 ein mittlerweile positiv entschiedener Fördermittelantrag bei der AiF gestellt. Wir hoffen nun, innerhalb der nächsten zwei Jahre weitere Fortschritte hin zum industriellen Einsatz des Kletterroboters erzielen zu können.