Promotionsprojekt 7: Modellierung und messtechnische Untersuchung strukturintegrierter Aktor-Sensor-Systeme auf Basis alternativer elektroaktiver Polymere mittels elektromechanischer Ersatzmodelle
Inhaltsverzeichnis
Motivation
Durch den Einsatz dielektrischer Elastomeraktoren (DEA) lassen sich Faser-Elastomer-verbunde aktiv verformen. Die Integration von Sensoren in diesen Verbundstrukturen erlaubt die gleichzeitige Detektion des Verformungszustandes. Derartige Aktor-Sensor-Systeme eignen sich zur Herstellung adaptiver und interaktiver Soft-Robotik-Bauteile, die z. B. bei weichen Robotergreifern und bionischen Robotern eingesetzt werden können. Die bisher in PP 7 umgesetzten Aktor-Sensor-Systeme bestehen aus silikonbasierten DEA und Sensoren zur eindimensionalen Verformungsdetektion. In Weiterführung dieses PP sind nun Aktor-Sensor-Systeme zu entwickeln, mit denen sich dreidimensionale Verformungen sowohl erzeugen als auch detektieren lassen.
Stand der Forschung und eigene Vorarbeiten
Silikon- und acrylbasierte DEAs haben ein großes Einsatzpotenzial für extrem greifsensitive Anwendungen [1], Linearaktoren [2], pneumatische Ventile [3] und Flüssigkeitspumpen [4]. Im Rahmen der 1. Kohorte des GRK wurde ein Ansatz verfolgt, bei dem sich durch eine textiltechnische Verstärkung der Aktorstruktur ein mechanisch anisotropes Verhalten erreichen ließ [5, 6]. In [7] wurde zusätzlich ein resistiver Dehnungssensor geschaffen, mit dem sich die elastischen Verformungen überwachen lassen. Dort wurde außerdem ein einfaches elektromechanisches Netzwerkmodell für Verformungen in der Ebene vorgestellt, mit dem sich wesentliche Eigenschaften des Gesamtsystems erklären ließen. Gegenwertiger Forschungsbedarf liegt in der Entwicklung adaptiver Systeme, die sowohl Aktorik, Sensorik als auch textiltechnische Verstärkung vereinen. Für solche Systeme sind entsprechende elektro-mechanische Netzwerkmodelle zu entwickeln, die einfach in Gesamtsystemmodellen zur gezielten Ansteuerung und Regelung des Bewegungsverhaltens genutzt werden können.
Wissenschaftliche Fragestellung und Projektziele
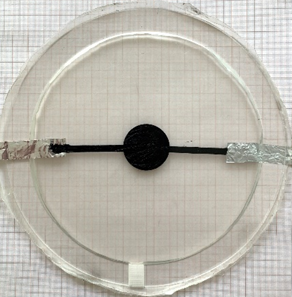
Polyurethan-basierter dielektrischer Elastomeraktor [8]
Aufgrund der gegenüber herkömmlichen Materialien höheren Dielektrizitätskonstanten könnten alternative elektroaktive Polymere, wie z. B. Polyurethan-, Chloropren-, Nitril-Butadien-Kautschuk oder Hydrogele, Vorteile gegenüber bisher verwendeten Materialien aufweisen. In diesem PP sollen deshalb DEA-basierte Aktor-Sensor-Systeme aus solchen unkonventionellen Polymeren entwickelt werden, mit denen eine im Vergleich zu silikonbasierten DEAs verbesserte Aktorwirkung erreicht wird. Durch neue konstruktive Ansätze und integrierte Sensoren soll dabei der dreidimensionale Deformationszustand der I-FEV hinreichend präzise detektiert werden. Ein weiterer Fokus soll auf der Entwicklung von Konstruktionselementen mit konstruktiv erreichtem auxetischem Verhalten liegen, d.h., dass in bestimmten Richtungen ein negatives Querkontraktionsverhalten erreicht wird, das sich zur Hervorrufung einfacher dreidimensionale Verformungen nutzen lässt. Ein Schwerpunkt soll weiterhin auf der Entwicklung geeigneter mechanoelektrischer Netzwerkmodelle und auf der messtechnischen Charakterisierung solcher Systeme liegen.
Literatur
| [1] | Shintake, J.; Schubert, B.; Rosset, S.; Shea, H.; Floreano, D.: Variable stiffness actuator for soft robotics using dielectric elastomer and low-melting-point alloy. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, (Deutschland), 28.09.-02.10.2015, 1097-1102. |
| [2] | Zhao, H.; Hussain, A. M.; Duduta, M.; Vogt, D. M.; Wood, R. J.; Clarke, D. R.: Compact Dielectric Elastomer Linear Actuators. Advanced Functional Materials 28 (2018), 1804328. |
| [3] |
Giousouf, M.; Kovacs, G.: Dielectric elastomer actuators used for pneumatic valve technology. Smart Materials and Structures 22 (2013), 104010. |
| [4] | Li, Z.; Zhu, J.; Foo, C. C.; Yap, C. H.: A robust dual-membrane dielectric elastomer actuator for large volume fluid pumping via snap-through. Applied Physics Letters 111(2017), 212901. |
| [5] |
Mersch, J.; Pfeil, S.; Lohse, F.; Probst, H.; Cherif, C.; Gerlach, G.: Textile-amplified dielectric elastomer actuators for soft robotics. 19th World Textile Conference on Textiles at the Crossroads AUTEX 2019, Ghent (Belgien), 11.-15.06.2019. |
| [6] | Pfeil, S.; Katzer, K.; Kanan, A.; Mersch, J.; Zimmermann, M.; Kaliske, M.; Gerlach, G.: A biomimetic fish fin-like robot based on textile reinforced silicone. Micromachines 11 (2020), 298. |
| [7] | Mersch, J.; Winger, H; Nocke, A.; Cherif, C.; Gerlach, G.: Experimental investigation and modeling of the dynamic resistance response of carbon particle-filled polymers. Macromolecular Materials and Engineering 305 (2020), 2000361. |
| [8] | Liebscher, H.; Tahir, M.; Wießner, S.; Gerlach, G.: Development, operation, and modeling of a polyurethane-based dielectric elastomer actuator. In: EuroEAP2021 - International Conference on Electromechanically Active Polymer (EAP) Transducers & Artificial Muscles, Technical Programme, Book of Abstracts, 1-3 June 2021, 19. |
Kontakt
Institut für Festkörperelektronik (IFE), Fakultät Elektrotechnik und Informationstechnik der TU Dresden
 © IFE/TUD
© IFE/TUD
Herr Prof. Dr.-Ing. habil. Gerald Gerlach
Institutsdirektor
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Besuchsadresse:
Günther-Landgraf-Bau 7-E01b Mommsenstraße 15
01069 Dresden