Promotionsprojekt 1: Entwicklung neuartiger faserförmiger Aktor- und Sensormechanismen basierend auf ionischen elektroaktiven Polymeren
Inhaltsverzeichnis
Motivation
Zur Realisierung von 3D-Verformungen in Faserverbundbauteilen mittels strukturintegrierter Mechanismen sind leistungsstarke faserförmige Aktoren von großer Bedeutung. Sie können bspw., analog zum Vorbild natürlicher Muskeln, elektrische Energie in eine mechanische Verformung umwandeln und hohe Kräfte übertragen bzw. große Stellwege realisieren. Besondere Vorteile ergeben sich daraus, dass Aktorik und Sensorik weitgehend auf den gleichen Wirkmechanismen beruhen. Somit können faserförmige Aktormechanismen gleichzeitig als strukturkompatible Sensoren zur In-situ-Erfassung vorliegender Beanspruchungs-, Verformungs- und Degradationszustände eingesetzt werden.
Stand der Forschung und eigene Vorarbeiten
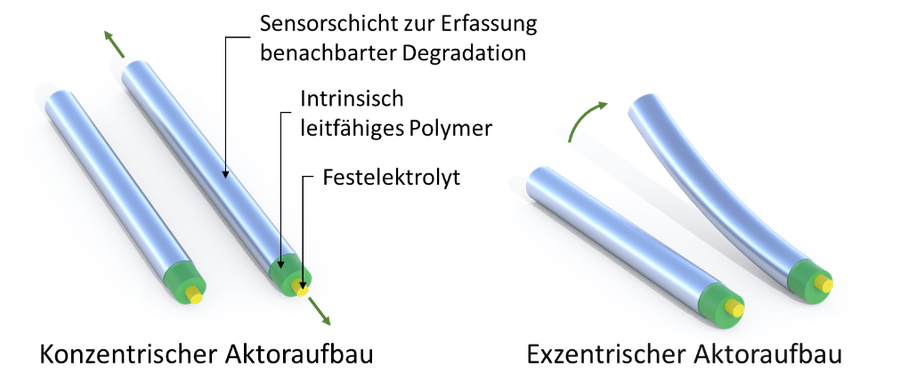
Planare Aktoren auf Basis elektroaktiver Polymere (EAP) sind in der Forschung bereits bekannt [1, 2] und weisen insbesondere aufgrund ihrer hohen Stelldynamik (> 10 Hz) ein sehr anwendungsrelevantes Eigenschaftspotenzial auf. In der 1. Kohorte des GRK 2430 wurde intensiv an faserförmigen EAP, konkret der Untergruppe der dielektrischen Elastomer-Aktoren (DEA), geforscht [3]. Hierbei lag der Fokus sowohl in der spinntechnischen Umsetzung sowie der Evaluierung der erzielten aktorischen Eigenschaften. Die zur Umsetzung der aktorischen Funktionalität notwendigen dehnbaren und elektrisch leitenden Filamente eignen sich zudem für einen sensorischen Einsatz [4]. Der nutzbare Aktoreffekt der DEA-Faserkonfiguration ist bisher jedoch begrenzt. Daher soll in der 2. Kohorte an faserförmigen Aktor-/Sensormechanismen auf Basis ionischer EAP, insbesondere aus dem Bereich der intrinsisch leitfähigen Polymer (CP), wie Poly(3,4-ethylenedioxythiophen) (PEDOT) oder Polyanilin (PAni) geforscht werden. Diese sind, ähnlich wie die in der 1. Kohorte untersuchten DEA, in der Lage, hohe Transformationsfrequenzen (in der Größenordnung von 10 Hz), Kräfte (> 1 N) und Verformungen (> 35 %) zu erreichen, erfordern allerdings eine im Vergleich zu DEA (> 5 kV) deutlich geringere Aktivierungsspannung von nur ca. 10 V [5]. Sie können im Gegensatz zu DEA potenzialspezifisch gezielt expandieren oder kontrahieren sowie in spezifischen Konfigurationen auch Biegebewegungen ausführen, was besonders für die in der 2. Kohorte angestrebten 3D-Verformungen vorteilhaft ist. Faserartige CP-Aktoren benötigen neben der eigentlichen aktorischen CP-Komponente auch einen Elektrolyten zum Ionentransport, vorzugsweise als Festkörperelektrolyt (z. B. basierend auf Polyethylenoxid). Während der CP-Aktor selbst synergetisch als Beanspruchungs- und Verformungssensor genutzt werden kann, ist zusätzlich eine außenliegende Sensorschicht zur Erfassung benachbarter Degradationen, wie Risse etc., zu implementieren. Zur Auslegung des Gesamtsystems, für die reproduzierbare und funktionsgerechte technologische Weiterverarbeitung sowie zur systematischen Evaluierung des Eigenschaftspotenzials besteht erheblicher Forschungsbedarf.
Wissenschaftliche Fragestellung und Projektziele
Ziel des PP 1 ist die Erforschung und Beschreibung in ihren Eigenschaften einstellbarerer faserförmiger, strukturintegrierbarer Sensoren und Aktoren auf Basis neuartiger CP und damit die Schaffung des notwendigen Grundlagenwissen zur Bereitstellung maßgeschneiderter ionischer EAP. Zur Umsetzung der komplexen, aus mehreren Komponenten bestehenden Fadenstrukturen sind die bestehenden Wechselwirkungen zwischen chemischer Modifikationen des polymeren Grundmaterials (z. B. durch Zusatz von Füllstoffen oder Additiven), der entstehenden Grenzschichten und der Struktur-Prozess-Eigenschaftsbeziehungen über die verschiedene textile Herstellungsprozesse, z. B. das Lösungsmittelspinnen, das Flechten und Beschichten, grundlegend und systematisch zu untersuchen. Darüber hinaus werden die geometrischen, mechanischen und elektrischen Materialeigenschaften der ionischen EAP experimentell analysiert und ein Materialmodell abgeleitet, auf dem die Arbeiten in PP 2 und PP 6 aufbauen.
Literatur
| [1] | Pfeil, S.; Henke, M.; Katzer, K.; Zimmermann, M.; Gerlach, G. A Worm-Like Biomimetic Crawling Robot Based on Cylindrical Dielectric Elastomer Actuators. Front. Robot. AI 2020, 7, 41101, doi:10.3389/frobt.2020.00009. |
| [2] | Pfeil, S.; Katzer, K.; Kanan, A.; Mersch, J.; Zimmermann, M.; Kaliske, M.; Gerlach, G. A Biomimetic Fish Fin-Like Robot Based on Textile Reinforced Silicone. Micromachines (Basel) 2020, 11, doi:10.3390/mi11030298. |
| [3] | Probst, H.; Lohse, F.; Cherif, C.; Kimura, M.; Katzer, K. Fiberbased Actuator Approaches for Smart Textile Structures. Tokyo (Japan), October 11, 2019. |
| [4] | Probst, H.; Katzer, K.; Nocke, A.; Hickmann, R.; Zimmermann, M.; Cherif, C. Melt Spinning of Highly Stretchable, Electrically Conductive Filament Yarns. Polymers (Basel) 2021, 13, 590, doi:10.3390/polym13040590. |
| [5] | Mirvakili, S.M.; Hunter, I.W. Artificial Muscles: Mechanisms, Applications, and Challenges. Adv. Mater. Weinheim. 2018, 30, doi:10.1002/adma.201704407. |
Kontakt
Institut für Textilmaschinen und Textile Hochleistungswerkstofftechnik (ITM), Fakultät Maschinenwesen der TU Dresden
 © Christian Hüller
© Christian Hüller
Herr Univ.-Prof. Dr.-Ing. habil. Dipl.-Wirt. Ing. Chokri Cherif
Institutsdirektor und Inhaber der Professur für Textiltechnik
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Besucheranschrift:
Hohe Straße 6, Zimmer 138
01069 Dresden
None