Promotionsprojekt 8: Elektromechanische Modellierung und messtechnische Untersuchung von helixförmigen Aktoren mit werkstoffintegrierter Sensorik
Inhaltsverzeichnis
Motivation
Für interaktive Faser-Elastomer-Verbunde werden Aktoren benötigt, welche deutlich größere Deformationen und Kräfte als bisher bereitstellen können. In den Arbeiten der 1. Kohorte wurde dabei auch das prinzipielle Potential von helixförmigen Aktoren als alternativen Ansatz zur Integration aktiver Fasern in Elastomerverbunde betrachtet. Hier zeigten erste Experimente, dass sich damit signifikant größere Deformationen erreichen lassen. Von besonderem Interesse sind dabei vor allem elektroaktive Materialien, da sie ein schnelles Ansprechen versprechen. Die maximal erreichbare Kraft eines dielektrischen Elastomeraktors könnte noch weiter gesteigert werden, wenn noch steifere Materialien als die bisher verwendeten Elastomere benutzt würden. Im konkreten Beispiel von helixförmigen Aktoren lassen sich zudem durch die konstruktiven Parameter der Helixform die Aktoreigenschaften, z.B. maximale Kraft und Verformung, einstellen.
Der Zusammenhang zwischen Form und Verhalten ist komplex und entscheidend von Aktorkonzept und Herstellungsverfahren abhängig. Ziel des PP ist es, (i) das (thermo-) elektromechanische Verhalten helixförmiger Aktoren zu modellieren, (ii) auf dieser Basis Richtlinien für eine vorteilhafte Auslegung solcher Aktoren abzuleiten, (iii) entsprechend Möglichkeiten für die Implementierung anderer Materialkombinationen aufzufinden und (iv) Sensoren in die Aktoren zu integrieren, mit denen das dreidimensionale Verformungsverhalten effizient ermittelt und in Echtzeit überwacht werden kann.
Stand der Forschung und eigene Vorarbeiten
Helixförmiger dielektrischer Aktor [1, 2]
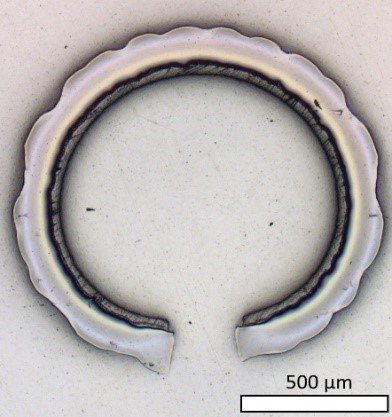
In Vorarbeiten [1, 2] wurde ein Demonstrator eines helixförmigen dielektrischen Aktors (siehe Abb.) hergestellt und gezeigt, dass sich durch die Nutzung der Helixform das Deformationspotential des Aktors um mehr als eine Größenordnung steigern lässt. Weiterhin wurde demonstriert, dass der Aktor gleichzeitig auch als Dehnungssensor nutzbar ist. Hier zeigte sich eine deutliche Abhängigkeit des elektrischen Widerstandes von der aufgebrachten Dehnung. Neben elektroaktiven Polymeraktoren wurden auch thermoaktive Polymeraktoren aus hochverdrehten Monofilamenten hergestellt. Eine Kombination aus elektro- und aus themoaktiven Komponenten würde weitere Freiheitsgrade für die Realisierung von 3D-Bewegungen ergeben.
Wissenschaftliche Fragestellung und Projektziele
Für das Verhalten von elektro- (und thermo-) aktiven helixförmigen Aktoren (aus PP1 und PP2) sind elektro-thermo-mechanische Netzwerkmodelle zu entwickeln, die auf der Basis der Material- und Geometrieparameter die Berechnung der Kräfte und Auslenkungen erlauben. Entsprechende Demonstratoren sind experimentell zu validieren und mit den Modellen zu vergleichen. Außerdem sollen Möglichkeiten erforscht werden, wo und wie sich vorteilhaft sensorische Strukturen zur Überwachung des Deformationszustands und Schädigungen aufgrund von Überdehnung integrieren lassen. Weitere Ziele sind die Entwicklung von neuartigen bisensitiven Aktorstrukturen, welche sowohl elektroaktiv als auch thermoaktiv sind.
Literatur
| [1] | J. Mersch, M. Koenigsdorff, A. Nocke, C. Cherif, G. Gerlach: High-speed, helical and self-coiled dielectric polymer actuator. Actuators 10 (2021), 15 (10 pages). |
| [2] | J. Mersch, M. Koenigsdorff, A. Nocke, C. Cherif, G. Gerlach: Manufacturing of a helical, self-coiling delectric polymer actuator. Proceedings 64 (2020), 38 (7 pages). |
Kontakt
Institut für Festkörperelektronik (IFE), Fakultät Elektrotechnik und Informationstechnik der TU Dresden
 © IFE/TUD
© IFE/TUD
Herr Prof. Dr.-Ing. habil. Gerald Gerlach
Institutsdirektor
Eine verschlüsselte E-Mail über das SecureMail-Portal versenden (nur für TUD-externe Personen).
Besuchsadresse:
Günther-Landgraf-Bau 7-E01b Mommsenstraße 15
01069 Dresden