VarioKnie
Variables interaktives Prothesenkniegelenk
| Finanzierung: | KMU-Innovativ – Medizintechnik |
| Förderkennzeichen: | 13GW0197E |
| Partner: | Orthopädietechnik Scharpenberg e. K.; SONOTEC Ultraschallsensorik Halle GmbH; Thorsis Technologies GmbH; GFaI Gesellschaft zur Förderung angewandter Informatik e. V.; Universitätsmedizin Rostock, Abteilung für Unfall-, Hand- und Wiederherstellungschirurgie |
| Laufzeit: | 12/2017 - 11/2020 |
| Kontakt: | Christian Stentzel |
Das Projekt VarioKnie strebt ein neuartiges exoprothetisches Kniegelenk an, das die Vorteile heutiger Lösungen kombiniert und Nachteile der bestehenden Lösungen umgeht. Auf dem Markt befindliche Systeme basieren auf exklusiv monozentrischen oder polyzentrischen Kinematiken, d.h. der Prothesenfuß vollführt während der Schwungphase eine ideale Kreisbahn oder eine unsymmetrische Bahnkurve bzgl. des Kniegelenks. Eine Monozentrik bietet eine hohe Sicherheit für den Anwender, bedingt jedoch den Nachteil, dass während der Schwungphase der benötigte Abstand zwischen Kniegelenk und Boden größer wird, sodass der Anwender zum Anheben seiner Hüfte angehalten ist. Neben einer erhöhten Stolpergefahr sind ein erhöhter Energiebedarf sowie eine unnatürliche Haltung und Belastung von Nachteil. Diese Nachteile weist eine Polyzentrik nicht auf, da sich der Abstand in der Schwungphase zwischen Kniegelenk und Fußspitze verkürzt. Nachteilig ist dagegen eine geringere Standsicherheit außerhalb der Streckphase sowie ein meist fehlender mikroprozessorgesteuerter Dämpfer, um die Stand- und Schwungphase zu kontrollieren.
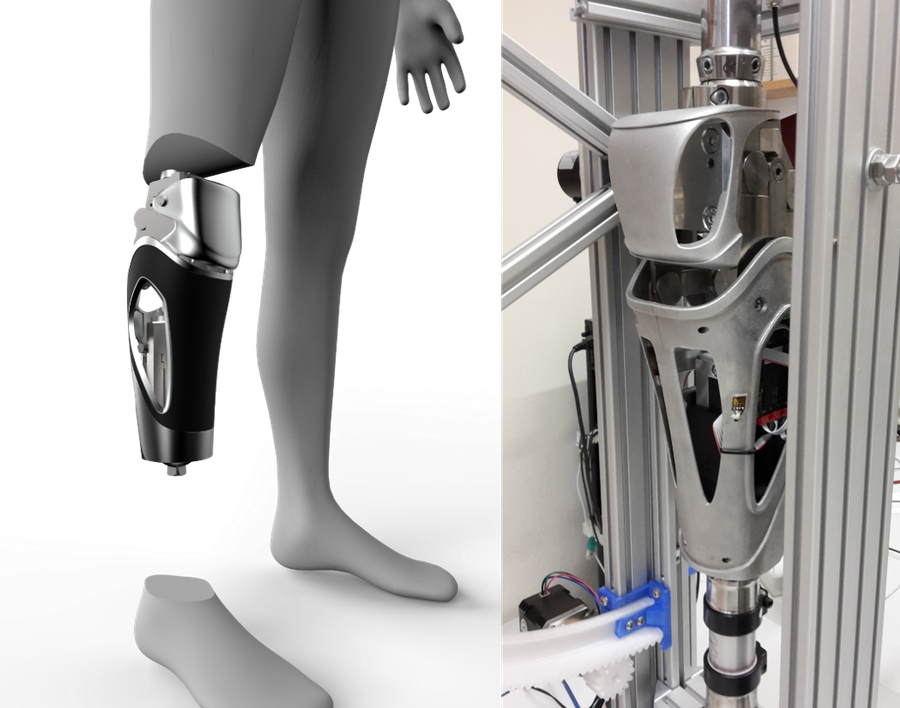
Im Ergebnis der Arbeiten steht ein Prothesenkniegelenk, dass eine elektronisch steuerbare Schaltung zwischen einer monozentrischen und polyzentrischen Kinematik in Abhängigkeit der Situation bzw. des Anwenderwunsches erlaubt. Eine schaltbare Kinematik ist ein absolutes Novum auf dem Gebiet der exoprothetischen Kniegelenke. Ein natürlicheres Gangbild, breitere und flexiblere Einsatzmöglichkeiten sowie eine Reduktion von Fehl- und Überbelastungen des Anwenders werden gegenüber derzeitigen exoprothetischen Kniegelenken erzielt. Darüber hinaus wird die Mobilität erhöht bzw. die Ermüdung und das Sturzrisiko verringert.
Der entwickelte Hydraulikzylinder als Dämpfungselement ist ebenfalls elektronisch steuerbar, sodass vielfältige Funktionen über eine Software implementiert werden können und das Produkt somit zu den mikroprozessorgesteuerten Kniegelenken zählt. Das Prothesenkniegelenk ist für Anwender bis 150 kg (DIN EN 10328 >> P7) ausgelegt und weist prototypisch bedingt keine Wasserfestigkeit auf, das jedoch für eine Serie geplant ist. Zur Erlangung einer Leichtbauweise sind hochbeanspruchte Bauteile aus Titan und geringbeanspruchte aus Aluminiumlegierungen gefertigt. Darüber hinaus wird aus ästhetischen Gründen und zur Masseeinsparung das Gehäuse als 3D-Druck (Aluminium) ausgeführt.
Aufgrund der methodisch breiten Aufstellung der Stiftungsprofessur für Baumaschinen können die Themen der Kinematiken, des Leichtbaus und der Hydraulik abgedeckt sowie die Methoden der FEM, CFD und Systemsimulation in das Projekt einfließen.