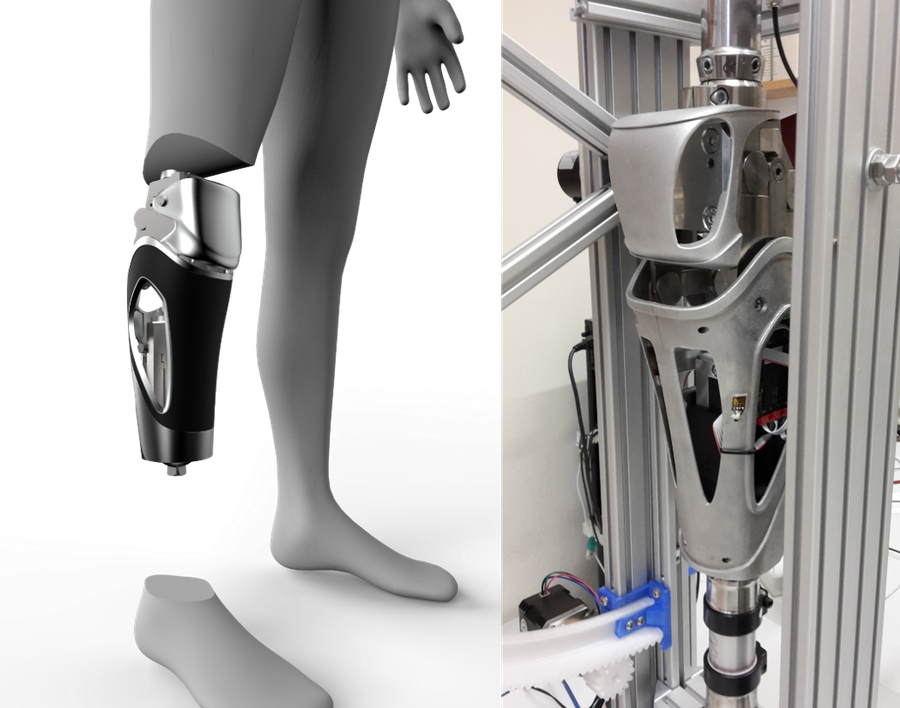
VarioKnie
Variable interactive prosthetic knee joint
| Funding: |
"KMU-Innovativ – medical technology" by Federal Ministry of Education and Research |
| Funding code: | 13GW0197E |
| Partner: | Orthopädietechnik Scharpenberg e. K.; SONOTEC Ultraschallsensorik Halle GmbH; Thorsis Technologies GmbH; GFaI Gesellschaft zur Förderung angewandter Informatik e. V.; Universitätsmedizin Rostock, Abteilung für Unfall-, Hand- und Wiederherstellungschirurgie |
| Duration: | 12/2017 - 11/2020 |
| Contact: | Christian Stentzel |
The VarioKnie project aims at a new type of exoprosthetic knee joint that combines the advantages of today's solutions and avoids the disadvantages of the existing solutions. Systems on the market are based on exclusively monocentric or polycentric kinematics, i.e. the prosthetic foot performs an ideal circular path or an asymmetrical path curve with respect to the knee joint during the swing phase. Monocentric offers a high level of safety for the user, but has the disadvantage that the required distance between the knee joint and the floor increases during the swing phase, so that the user is forced to lift his hip. In addition to an increased risk of stumbling, an increased energy requirement and an unnatural posture and loads are disadvantageous. A polycentric does not have these disadvantages because the distance in the swing phase between the knee joint and the tip of the foot is reduced. A disadvantage, however, is a lower stability outside the extension and a mostly missing microprocessor-controlled damper in order to control the stance and swing phase.
The result of the work is a prosthetic knee joint that allows an electro-mechanical switching between monocentric and polycentric kinematics depending on the situation or the user's request. Switchable kinematics is an absolute novelty in the field of exoprosthetic knee joints. A more natural gait pattern, wider and more flexible application options as well as a reduction of incorrect and excessive loads on the user are achieved compared to current exoprosthetic knee joints. In addition, mobility is increased and physical fatigue and the risk of falling is reduced.
The hydraulic cylinder developed as a damping element can also be controlled electronically, so that a wide range of functions can be implemented using software and enables a microprocessor-controlled knee joint. The prosthetic knee joint is designed for users up to 150 kg (DIN EN 10328 >> P7). The prototype has no water resistance, but it will be implemented in series. To achieve a lightweight construction, highly stressed components are made of titanium and lightly stressed components of aluminum alloys. In addition, the technology of 3D printing (aluminium) is used to make the housing aesthetic and to save mass.
The Endowed Chair of Construction Machinery has a wide range of methods and topics. Kinematics, lightweight construction or hydraulics are common topics and methods like FEM, CFD or system simulation can be incorporated into the project.